Sistemas de control
Introducción
El hombre ha utilizado herramientas para satisfacer sus necesidades. Por ejemplo, descubrió, quizá por casualidad, cómo obtener fuego para proporcionarse calor y cocinar sus alimentos. Lo hizo frotando enérgicamente dos trozos de cierta piedra (pedernal).
La piedra era su herramienta. Hoy en día, se dispone de pequeños y económicos encendedores que permiten disponer inmediatamente de fuego. Si se los observa con atención, se verá que tienen una pequeña piedra, que cuando es rozada por la medita metálica que hacemos girar, desprende chispas que encienden el gas.
Precisamente, el material con que está hecha esa pequeña piedra es, en esencia, el mismo que utilizaban nuestros antepasados de las cavernas. En la actualidad lo encontramos, junto con un tanque de gas, una válvula que regula su salida, una entrada de oxígeno y hasta otra válvula de recarga formando parte de un sistema: el encendedor. Cada componente, por sí mismo, no puede proporcionar fuego, pero sí puede hacerlo el conjunto.
Características y tipos de sistemas de control
Un encendedor, una bicicleta y un automóvil son sistemas que funcionan sólo si cuentan con todos sus componentes y éstos desarrollan sus funciones en forma simultánea.
Un sistema es un conjunto de elementos o dispositivos que interactúan para cumplir una función determinada. Se comportan en conjunto como una unidad y no como un montón de piezas sueltas.
El comportamiento de un sistema cambia apreciablemente cuando se modifica o reemplaza uno de sus componentes; también, si uno o varios de esos componentes no cumplen la función para la cual fueron diseñados. Entonces, resulta necesario controlar cada elemento en forma independiente, o bien, el resultado final de todo el sistema.
Se puede controlar la batería de un auto, la presión de los neumáticos, la temperatura del agua de refrigeración o la presión de aceite: batería, neumáticos, agua de refrigeración y aceite son algunos de los componentes de un automóvil. Pero, además, es posible controlar la velocidad del auto, que es el resultado del funcionamiento del motor en su conjunto.
Consideremos, por ejemplo:
Una cocina como "sistema integral hogareño de cocción de alimentos".
¿Cómo hacemos para supervisar la temperatura del horno para cocinar una torta?
Primero, encendemos el horno, y luego, giramos la perilla que lo identifica. Con este accionar, se modifica la apertura de la válvula que regula la cantidad de gas que llega al quemador del horno, y de esta manera su temperatura final.
Esta operación permitirá accionar en forma manual el sistema de control de la temperatura del horno. Lo haremos teniendo en cuenta nuestra experiencia anterior o las indicaciones de la receta que leímos en un libro, para que el resultado sea el esperado. Hemos controlado el proceso.
Ahora bien, a medida que el hombre y las, técnicas por él desarrolladas evolucionaron, las máquinas dejaron de ser herramientas que realizaban una sola operación para ejecutar varias de manera consecutiva y simultánea. Entonces, los procesos resultaron más Complejos, más costosos y de mayor duración. Por lo tanto, no fue posible controlar el sistema manualmente, sino que se hizo necesario el empleo de diversos mecanismos.
Por ejemplo:
Consideremos una pequeña planta embotelladora de vino. Hace algunos años, para que una máquina colocara el corcho a presión, una empleada debía sostener la botella ya llena en forma manual. Hoy en día, una máquina llena la botella vacía, la tapa y hasta le coloca la etiqueta en pocos segundos. Y, aun más, todo esto lo hace simultáneamente con varios envases. Es decir que, con el tiempo, se no se hacen más operaciones individuales, y se pasa a realizar procesos o conjuntos de operaciones vinculadas entre sí.
¿Qué hace que nuestra máquina embotelladora funcione adecuadamente, tome sólo una botella por vez, no pegue tres etiquetas en cada envase, o deje de funcionar si el líquido que envasa se ha terminado?
Pues de esto se ocupa el control automático
|
La aplicación de sistemas de control a los artefactos electrodomésticos ha mejorado la vida de las personas. Por ejemplo, antes se usaban las planchas que funcionaban con carbón. Más tarde, las abuelas utilizaron pesadas planchas eléctricas, que tardaban mucho tiempo en calentar, y cuya temperatura resultaba muy difícil de regular. Hoy en día, las planchas son livianas y cómodas, regulan la temperatura según el tipo de tela, rocían la ropa con vapor, etcétera.
Pero los cambios tecnológicos incidieron sobre todo en la actividad industrial. Infinidad de tareas, realizadas hasta hace poco en forma manual, hoy se efectúan mecánicamente. Más aún, los controles automáticos se han generalizado por completo en el mundo de la industria. En consecuencia, las industrias requieren menos operarios "manuales" y más personal especializado, por ejemplo, técnicos electricistas, electrónicos e informáticos, capaces de montar, controlar, corregir y reparar los sistemas implementados. La capacitación técnica resulta, entonces, imprescindible para poder acceder a estos nuevos puestos de trabajo.
Tipos de control
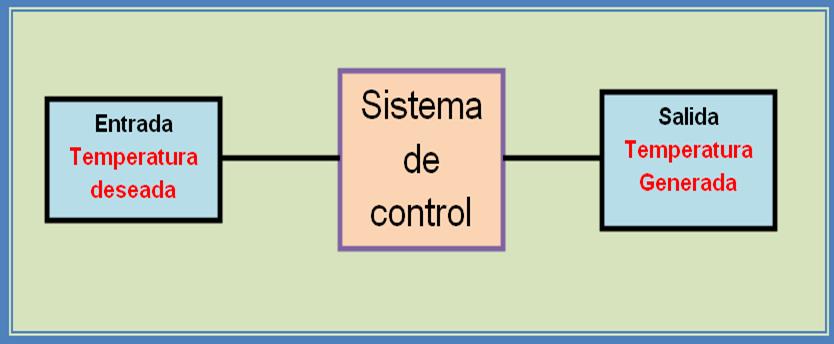
El control de un sistema se efectúa mediante un conjunto de componentes mecánicos, hidráulicos, eléctricos y/o electrónicos que, interconectados, recogen información acerca del funcionamiento, comparan este funcionamiento con datos previos y, si es necesario, modifican el proceso para alcanzar el resultado deseado. Este conjunto de elementos constituye, por lo tanto, un sistema en sí mismo y se denomina sistema de control. Para estudiarlo, es necesario suponer que sus componentes forman conjuntos, que reciben una orden o entrada y producen una respuesta o salida. Estos conjuntos se representan gráficamente en forma de rectángulos o bloques vinculados por flechas, las cuales muestran las conexiones que existen entre aquéllos y los efectos que producen. La forma más simple para esquematizar un proceso de control es un bloque sobre el que incide una entrada y se genera una salida. Por ejemplo, para la regulación de la temperatur
|
SIGUIENTE
Sistemas de control manuales y automáticos
Los sistemas de control pueden ser manuales o automáticos.
Sistema Manual
Para obtener una respuesta del sistema, interviene el hombre sobre el elemento de control.
La acción del hombre es, entonces, la que actúa siempre sobre el sistema (cierra o abre, acciona un interruptor, aprieta el freno...), para producir cambios en el funcionamiento.
Encontramos sistemas de control manuales, por ejemplo, en:
El frenado de un auto.
El encendido y el apagado de las luces en una habitación.
La operación de la hornalla de gas de una cocina.
El control del agua de una canilla.
Etc.
Sistema Automático
 El sistema da respuesta sin que nadie intervenga de manera directa sobre él, excepto en la introducción de condiciones iniciales o de consigna. El sistema da respuesta sin que nadie intervenga de manera directa sobre él, excepto en la introducción de condiciones iniciales o de consigna.
El sistema “opera por sí solo”, efectuando los cambios necesarios durante su funcionamiento. Así, se reemplaza el operador humano por dispositivos tecnológicos que operan sobre el sistema (relés, válvulas motorizadas, válvulas solenoides, actuadores, interruptores, motores, etc.).
Encontramos sistemas automáticos de control en, por ejemplo:
Heladeras.
Termotanques.
Alumbrado público.
Piloto automático de un avión.
Equipos de aire acondicionado.
Lazos de control
Ya consideramos una de las particularidades que presentan los sistemas de control, la que nos permitió diferenciarlos entre manuales y automáticos.
Los sistemas de control, además, pueden ser caracterizados por lo que se denomina lazos de control.
Por Ejemplo:
Supongamos que necesitamos hervir el agua fría que llena una cacerola, en una cocina a gas.
La primera posibilidad es que encendamos la hornalla de la cocina, regulemos la llama del fuego, coloquemos la cacerola sobre la hornalla y nos retiremos a realizar otras actividades. ¿Qué ocurre, entonces? El agua comienza a calentarse, aumentando su temperatura, hasta que comienza a hervir; cuando llega a la temperatura de ebullición y la llama de la hornalla sigue encendida y el agua, tal vez, se desborde de la cacerola, con el riesgo de que se puede apagar la llama de la hornalla y continuar saliendo gas–.
La segunda posibilidad es que encendamos la hornalla de gas, regulemos la llama del fuego, coloquemos la cacerola sobre la hornalla y permanezcamos frente a la cocina observando el agua de la cacerola. ¿Qué ocurre, en esta situación? El agua comienza a calentarse, aumentando su temperatura, hasta que comienza a hervir; cuando llega a este punto, actuamos sobre la llave de la hornalla disminuyendo, poco a poco, la llama del gas, hasta que –llegado el punto de ebullición del agua– cerramos totalmente el paso de gas, apagándose así, la llama de la hornalla.
Podemos detectar que, en la primera situación, el hecho de que el agua esté hirviendo (salida del sistema) no tiene ninguna acción sobre la llama de la hornalla (entrada del sistema).
En cambio, en la segunda posibilidad observamos que, al iniciarse el proceso de ebullición (salida del sistema), la persona presente comienza a actuar sobre la llave de gas de la hornalla, disminuyendo la llama (entrada del sistema) hasta apagarla.
En el primer caso, estamos ante un sistema de control de lazo abierto; en la segundo, ante un sistema de control de lazo cerrado.
|


El ejemplo anterior ilustra, con sus dos variantes, controles manuales del proceso porque es una persona quien actúa sobre el sistema, regulando y apagando la llama de la hornalla, en el caso de lazo cerrado.
Ampliación Conceptual
Sistemas de control de lazo abierto
En estos sistemas la señal de salida no influye sobre su regulación. Se obtienen los datos de entrada y se ejecuta el proceso de control.
Un ejemplo de sistema de lazo abierto es el semáforo. La señal de entrada es el tiempo asignado a cada luz (rojo, amarilla y verde) de cada una de las calles. El sistema cambia las luces según el tiempo indicado, sin importar que la cantidad de tránsito varíe en las calles.
La mayor parte de sistemas de lazo abierto serán automatismos a los que no podremos llamar en sentido estricto robots porque, al no tener en cuenta la salida, su capacidad de toma de decisiones “inteligentes” es muy limitada.
Por ejemplo, un sistema de riego en lazo abierto tiene un temporizador que lo pone en marcha todos los días a una determinada hora; riega las plantas durante un cierto tiempo pasado el cual se interrumpe, con independencia de que las plantas hayan recibido la cantidad de agua adecuada, una cantidad excesiva o una cantidad insuficiente. Se trata de un automatismo, pero no de un auténtico robot.
Sistemas de control de lazo cerrado
Se trata de aquellos sistemas que poseen retro alimentación de la señal de salida que interviene en la regulación.
Un equipo de aire acondicionado es un sistema de lazo cerrado, ya que cuenta con un sensor que permanentemente registra la temperatura ambiente, y con un comparador, que determina sí la temperatura es la deseada. Si es necesario corregirla, el comparador da la señal para que esto ocurra
.
un sistema de riego en lazo cerrado, no se detendrá al cabo de un tiempo fijo, sino cuando detecte que se está consiguiendo el objetivo buscado, es decir, que la humedad de las plantas es la adecuada. Y se pondrá en marcha, no a una hora determinada, sino en cualquier momento en que la humedad se sitúe por debajo de un valor determinado.
Las estufas pueden tener sistemas de control de lazo abierto o de lazo cerrado.
Esquema lazo abierto
Esquema lazo cerrado
Consideremos, por ejemplo, el subsistema motor, en una heladera eléctrica familiar:
La persona que manipula la heladera selecciona un punto de temperatura interna y acciona manualmente el regulador que se encuentra en el interior del artefacto, que actúa como señal de referencia.
Se pone en funcionamiento la heladera y el sistema de control que posee el equipo comanda el funcionamiento (paradas y arranques) del equipo de frío, tratando de mantener el valor de la temperatura interna en el valor más ajustado posible al valor prefijado.
Estas operaciones de arranque y parada las efectúa automáticamente, sin intervención del hombre.
Pensemos ahora en el siguiente ejemplo del horno. ¿Cómo puede regularse la temperatura del horno para cocinar un pollo durante una hora?
Los pasos a seguir serían:
1. Encender el quemador;
2. Girar la perilla de la válvula que regula el gas, de manera que la cantidad de calor que se genera satisfaga las indicaciones de la receta leve, moderado, fuerte). En ese momento, una válvula reguladora (el sistema de control) se abrirá o se cerrará para que pase la cantidad de gas necesaria para que arda en el quemador con el calor deseado. Si se desea modificar la temperatura, se debe girar la perilla de la válvula a fin de dejar pasar más o menos gas.
Luego hay que colocar el pollo dentro del horno durante el tiempo establecido.
Éste es un sistema de control de lazo abierto, pues la salida no modifica el funcionamiento del sistema.
¿Pero qué sucedería si durante la hora de cocción la presión del gas en la línea disminuyera? Pasará menos gas y no se alcanzará el punto de cocción en el tiempo buscado.
Los sistemas de lazo abierto no cumplen su función en presencia de modificaciones o perturbaciones del medio.
Este tipo de inconveniente tiene lugar a diario en innumerables situaciones; para solucionarlos, se han desarrollado los sistemas de lazo cerrado, en los cuales se incluyen tres nuevos elementos: el sensor, la retroalimentación y el comparador.
El sensor colecta la información sobre el estado de salida del sistema.
La retroalimentación es la vía por la cual viaja esa información.
El comparador coteja esa salida con la entrada del sistema.
Si la entrada y la salida son iguales, el sistema se encuentra estabilizado; pero si son diferentes, entonces el controlador reaccionará modificando el sistema para corregir la situación.
Éste es el caso de los hornos que se usan en los procesos industriales, y que tienen un sistema de control de lazo cerrado. En ellos, la entrada es la temperatura buscada del horno, por ejemplo, 120 ºC. El controlador, una válvula de gas electrónica, dejará pasar suficiente gas a fin de alcanzar esa temperatura. Si la presión del gas descendiera, o si hiciera mucho frío alrededor, entonces, un sensor de temperatura enviaría una señal de retroalimentación al comparador, y éste abrirá la válvula para dejar pasar mayor cantidad de gas.
El comparador permanentemente toma la señal de entrada, la compara con la retroalimentación, e informa al controlador si debe realizar modificaciones para estabilizar el sistema.
Termostato bimetal para un quemador de gas
Termostato electromecánico
Lazos de realimentación
En los sistemas de control pueden existir dos tipos de lazos de realimentación (Gay, A.; Ferreras, M. Op.cit.):
Lazo de realimentación positiva (aumento de la divergencia)
Lazo de realimentación negativa (convergencia hacia un fin)
Realimentación positiva
Para comprender este concepto consideremos, inicialmente, el caso de las poblaciones
Y de la basura que en ellas se produce:
Es éste un caso de realimentación positiva –en el lenguaje común se suele conocer como efecto “bola de nieve”–.
Esto ocurre cuando un aumento de la señal de realimentación produce un aumento en la salida del sistema: la situación final cada vez tiene más divergencia con respecto a la situación inicial.
La representación esquemática en un diagrama en bloques sería:
|
Lo señalado para el aumento también es válido para la disminución. En cualquiera de los casos, el sistema tiende al desequilibrio (destrucción o bloqueo, respectivamente).
Es decir, el sistema tiende al colapso.
Por este motivo, los sistemas de realimentación positiva no tienen campo de aplicación en los sistemas de control automático que se utilizan en los procesos, plantas o equipos, ya que ahí lo que se trata de lograr es el equilibrio de los sistemas.
Realimentación negativa
El sistema de realimentación negativa es el utilizado en los sistemas de control automático, ya que –en general– se desea que el sistema tienda al equilibrio.
Esto sucede con:
El control de la temperatura de una plancha,
El ajuste a la ruta de un avión cuando éste está conducido por un piloto automático,
El número de r.p.m. en un motor si aumenta o disminuye la carga,
La regulación de la salida de agua de un dique si aumenta o disminuye el aporte de agua al embalse, etc.
La representación esquemática de un sistema de realimentación negativa mediante un diagrama en bloques es ésta:
Señales de control
Los sistemas de control operan, en general, con magnitudes de baja potencia, llamadas genéricamente señales de control o, simplemente, señales.
Las señales de control gobiernan los accionamientos de potencia (motores, contactores, válvulas de cierre y apertura o regulación, distintos componentes eléctricos y, o mecánicos, etc.) que actúan sobre equipos, plantas o procesos, y que son los que realmente –en forma directa o indirecta– llevan a cabo el aporte energético sobre el sistema.
Las señales que gobiernan los accionamientos de un sistema –señales de control– son producidas a partir de las señales de referencia y de realimentación que llegan al dispositivo de comparación, el cual emite una señal de desviación que actúa sobre el elemento de control y éste sobre el proceso.
Las señales de realimentación son producidas por sensores (denominados también detectores o captadores)que intervienen en el proceso, equipo, planta o sistema.
Éstos convierten información física real –como temperatura, presión, nivel de iluminación, velocidad, tiempo, intensidad de la corriente eléctrica, tensión, peso, caudal, cantidad de piezas, etc. –, en una señal de realimentación que, una vez procesada, es utilizada para supervisar y controlar el sistema.
Actúan como sensores:
El termostato de la heladera, plancha o el del equipo de aire acondicionado,
El dispositivo de encendido de la luz de emergencia, en pasillos de edificios,
El dispositivo que no habilita el funcionamiento de ascensores, trenes y subterráneos por puerta abierta,
El presostato que controla la presión de un tanque de aire comprimido, etc.
A los sensores se los suelen denominar, frecuentemente, transductores, cuando convierten una señal de una naturaleza en una señal de otra naturaleza. Pero, en aplicaciones industriales se utiliza, en general, la palabra transductor, cuando se quiere señalar una conversión de una señal de cualquier naturaleza en una señal eléctrica.
Son ejemplos de transductores:
Un micrófono, que transforma energía sonora en una señal eléctrica.
El parlante de un baffle, que actúa de modo inverso al micrófono, ya que transforma una señal eléctrica de audio en energía sonora.
Una termocupla, que transforma una señal de temperatura en una señal eléctrica (estufa a gas, calefón, termotanque, etc.).
Un detector de llama, que transforma una señal luminosa (energía radiante) en una señal eléctrica.
Una dínamo tacométrica, que transforma la velocidad angular del volante del motor de un auto, en una tensión eléctrica que se lee en el taquímetro (voltímetro calibrado en r.p.m.) del tablero del auto como r.p.m.
Las señales producidas por sensores pueden ser analógicas o digitales binarias. (Binaria significa con dos estados: dos dígitos; alto, bajo; high – low; 1 – 0)
Sensores o captadores
Habitualmente los sistemas automáticos se ponen en marcha según los datos que reciben del entorno mediante unos dispositivos llamados sensores. Los sensores miden o detectan los cambios que se producen en el entorno respecto a ciertas magnitudes: temperatura, posición, velocidad, presión, etc.
Las puertas que se abren automáticamente en presencia de una persona, tienen un sensor óptico. Los sensores son dispositivos que captan información del medio y son capaces de traducir y transmitir esa información a un elemento controlado:
De acuerdo con el tipo de señal que emitan, los sensores se pueden clasificar en digitales y analógicos. En los sensores digitales, la señal de salida sólo tiene dos posibles estados: "bajo" y "alto". La salida cambia de un estado a otro cuando el estímulo de entrada supera un umbral predeterminado. En cambio, en los sensores analógicos, la seña! de salida se modifica proporciona (mente a la señal de entrada. Por ejemplo, un termómetro digital emitirá una señal eléctrica si la temperatura excede, por ejemplo, los 70 °C, y una baja si ésta es menor de 70 °C. Por su parte, el termómetro analógico emitirá una corriente eléctrica tanto más intensa cuanto mayor sea la temperatura. De acuerdo con la señal que reciben, los sensores se pueden clasificar en ópticos y de posición (de fin de carrera y de distancia), entre otros.
Los sensores ópticos son dispositivos sensibles a la cantidad de luz que incide sobre ellos. Contienen una célula fotoeléctrica, capaz de conducir más corriente eléctrica cuanta más energía luminosa recibe. Son muy utilizados como sensores de proximidad, es decir, reaccionan a la presencia de una persona u objeto. Están compuestos por un emisor de luz infrarroja y un receptor del mismo tipo de luz. Ambos miran en la misma dirección, y cuando un objeto se sitúa frente a ellos, la luz emitida por el emisor es reflejada en el objeto hacia el receptor, el cual se activa. El emisor y el receptor también pueden montarse a cierta distancia uno del otro, a fin de construir una barrera luminosa. Cuando un objeto se interpone, el receptor deja de recibir la luz emitida por el emisor.

Los Sensores de Posición permiten conocer la posición relativa de un objeto en un sistema. Pueden percibir la presencia del objeto en el extremo de un recorrido, como los sensores de fin de carrera, o la distancia a la que se encuentra el objeto del sensor, como los sensores de distancia.
Los Sensores de Contacto (fin de carrera) son, básicamente, interruptores que se accionan cuando un elemento móvil alcanza determinado punto de su recorrido, que no se desea sobrepasar. También se usan como elementos de seguridad: todos los ascensores tienen estos sensores en los pisos más bajos y más altos, que desconectan y bloquean el sistema de movimiento ante cualquier desperfecto. Son excelentes ejemplos de sensores digitales. Mientras el objeto no llegue al final del recorrido, la salida se encuentra, por ejemplo, en "bajo". Cuando el objeto acciona el sensor, la salida cambia inmediatamente a "alto".
Los Sensores de Temperatura
El sensor de temperatura (que muchas veces es mal llamado también termostato) es un sensor graduado con un rango de operación.
Los Sensores de Humedad se basan en que el agua no es un material aislante como el aire sino que tiene una conductividad eléctrica, por lo tanto un par de cables eléctricos desnudos (sin cinta aislante recubriéndolos) van a conducir una pequeña cantidad de corriente si el ambiente es húmedo; si colocamos un transistor en zona activa que amplifique esta corriente tenemos un detector de humedad.
Los Sensores Magnéticos básicamente detectan los campos magnéticos que provocan los imanes o las corrientes eléctricas. El principal es el llamado interruptor Reed; consiste en un par de láminas metálicas de materiales ferromagnéticos metidas en el interior de una cápsula que se atraen en presencia de un campo magnético, cerrando el circuito.
Los Sensores Infrarrojos son diodos capaces de emitir luz infrarroja y transistores sensibles a este tipo de ondas y que por lo tanto detectan las emisiones de los diodos. Esta es la base del funcionamiento de los mandos a distancia; el mando contiene diodos que emiten infrarrojos que son recibidos por los fototransistores del aparato.
Los diodos de infrarrojos son a simple vista idénticos a los LED, como se puede apreciar en la imagen, y se representan de la misma manera, mientras que el símbolo de los fototransistores es semejante al de los transistores normales pero añadiendo las flechas que representan la luz que reciben. Recordemos que las flechas salen del elemento cuando éste emite luz o radiación infrarroja y entran en él cuando el elemento recibe dicha radiación.
Los Sensores de Humo detectan los humos visibles mediante la absorción o difusión de la luz. Básicamente es un aparato de seguridad que detecta la presencia de humo en el aire y emite una señal avisando del peligro de incendio. Son utilizados para la detección de gases y humos de combustión que no son visibles a simple vista.
Sensor de Viento. La mayoría de los modelos de mercado se basan en el principio de funcionamiento de un anemómetro de paletas que giran a una velocidad proporcional al viento; el límite de velocidad puede ajustarse a través de un potenciómetro.
Sensor de Lluvia. Un sensor de lluvia ofrece una señal binaria cuando se detecta que se ha producido la caída de gotas de lluvia en cantidad suficiente. La utilización está relacionada con el riego de jardines, recogida de toldos, cierres de persianas, etc.
Acondicionamiento de señales
Normalmente las señales que recibe el microprocesador procedente de los sensores no son adecuadas para su procesamiento, por lo que deben ser modificadas. También deben ser acondicionadas al salir del controlador para hacerlas compatibles con los actuadores.
Para adecuar o acondicionar estas señales existen elementos que veremos a continuación:
Elementos de Protección: Protegen al microprocesador de señales eléctricas de voltaje o intensidad elevadas. Para ello se emplean los fusibles.
Amplificadores: Las señales emitidas por los sensores son de pocos milivoltios, por lo que resulta necesario amplificarlas. Para ello se emplean amplificadores operacionales.
Comparadores: Los comparadores, como su nombre lo indica, comparan las señales de entrada y de salida provenientes de la retroalimentación. Pueden ser analógicos -comparan magnitudes similares en forma continua (corrientes eléctricas, distancias, presiones, etc.) o digitales -comparan señales "alto"-"bajo"-. Cuando la señal de retroalimentación no coincide con la de entrada, envían otra señal a los controladores para que accionen los actuadores y equilibren el sistema, hasta que la señal de salida, en una nueva comparación, coincida con la de entrada. Permiten comparar las señales de entrada y salida. Se emplean amplificadores operacionales.
Filtros: Solo permiten el paso de una banda de frecuencias para eliminar las distorsiones de las señales analógicas de los sensores.
Convertidores de Señal: La salida de la mayoría de los sensores es de tipo analógico y deben convertirse en digitales. Del controlador a los actuadores debe hacerse la conversión contraria, de digital a analógico.
Procesadores y Controladores
Entre los sensores y los actuadores de un sistema de control está la unidad de controlo controlador, que se encarga de analizar la información que le mandan los sensores, tomar decisiones y dar las órdenes para que actúen los elementos de salida.
Según la situación de control, el controlador puede configurarse como:
· Un circuito electrónico específico
· Un controlador lógico programable
· Un control por ordenador
Actuadores en los Sistemas de Control
El objetivo final de los sistemas de control automático consiste en iniciar, parar o regular el funcionamiento de los actuadores. Existen una gran cantidad de actuadores.
Cilindros Neumáticos e Hidráulicos. Proporcionan las fuerzas necesarias para partes móviles de maquinas y brazos de robots, a través de cilindros y pistones.
Motores Eléctricos. Los motores eléctricos de corriente continua se utilizan para proporcionar movimientos giratorios en los que se requiere mucha precisión.
Motores pasó a paso. Los motores paso a paso permiten controlar de forma precisa el ángulo de giro del motor, haciendo que el motor se coloque en una posición determinada.
Lámparas. Permiten suministrar luz cuando el sistema automático detecta a través de los sensores la falta de luz
Sirenas. Se trata de un elemento que generalmente se utiliza en sistemas de seguridad, el mismo recibe una señal la cual transforma la energía eléctrica en energía sonora. Puede tener además diferentes sistemas luminosos que funcionan en conjunto con la disuasión sonora.
Electro Válvulas. Una electroválvula es una válvula electromecánica, diseñada para controlar el flujo de un fluido a través de un conducto como puede ser una tubería.